
A 100mg hopping robot leg "Nanotaur"
Some unpublished results from the Harvard Microrobotics postdoc on a hopping robot leg with variable effective mechanical advantage

During my post-doc, I got somehow close to merging the legged work on Minitaur during my Ph.D. with the piezoelectrically driven laminate RoboBee architecture of the Harvard Microrobotics lab.
I never got around to publishing this work, but I did built a two-joint symmetric five-bar leg. As with Minitaur, actuating the two joints could produce motion and force in the plane to be used for hopping.
Leg design and transmission for hopping
In addition, something else that was very interesting (regretfully not explored) was tuning the variable effective mechanical advantage using the transmission specifically for hopping (like we did for flapping in another paper):

When the leg was compressed (and presumably pushing against the ground for jumping), the actuators had high effective mechanical advantage.
When extended (presumed flying through the air), the actuators had lower mechanical advantage
The two actuators could also be driven out-of-phase for walking or jumping in a plane:
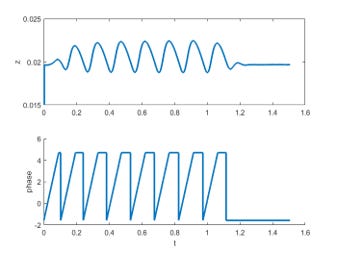
Hopping demonstration
Compare to Jerboa vertical hopping:
