
Task-based motor control algorithm design
Paper in RAL 2019 about applying task-specifics to BLDC control

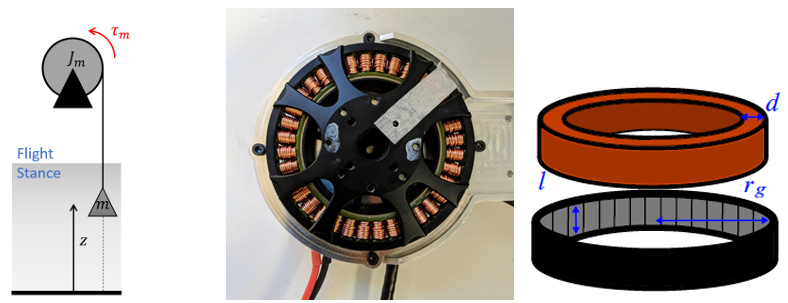
In keeping with my broad interest in optimizing robot design, in this project1, I looked at co-design of the motor control algorithm for a BLDC actuator with the task at hand. Normally in field-oriented control, a motor controller is purely programmed as a current amplifier — higher-level algorithms output a desired current, and the motor control algorithm attempts to ensure that the quadrature current tracks the desired current while minimizing the direct current.
However, looking at the task more broadly, there are situations in robotics when the task calls for high-speed motion, or urgent braking. In these types of instances, this paper shows that incorporating task-specific cues in the motor control algorithm can yield superior performance to treating it as a black-box current amplifier.
Results
For the braking task specifically, we were able to show improved performance when incorporating d-axis control (i.e. deviating from standard field-oriented control, where the d-axis voltage is strictly used to minimized d-axis current):
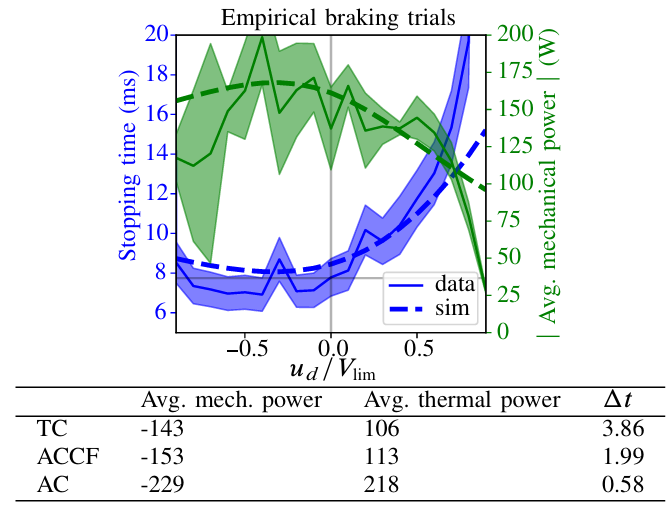
There are also results in the paper of utilizing these principles to affect the design of the motor itself.
Overall, the broad strategy here is to take advantage of full vertical integration and customization of various parts of the hardware stack. I haven’t seen any instance of any lab-grown or commercial robotics hardware do this yet, but I think it could be an interesting avenue to explore in resource- or power-constrained hardware.
Youtube recording of a workshop talk I gave including this topic: